
Introduction
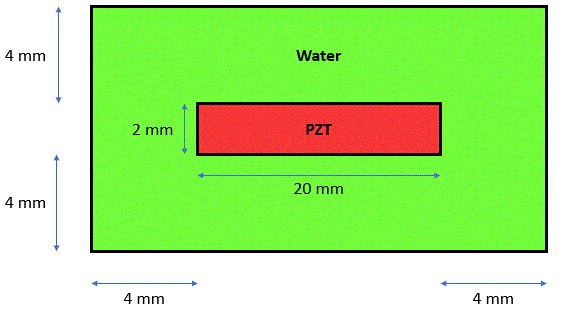
We will look into setting up a simple PZT 2D Disc example residing in a water load.
Model Inputs
- Default commands
- Parameterisation
Meshing
- Mesh Settings
- Keypoint Generation and Grid Setup
Materials
- Material Properties
- Assigning to Grid
Boundary Conditions & Loading
- Boundaries of the Model
- Time Functions
- Electrical Conditions
Model Outputs
- Calculated Properties
- Output Types
Process Model
- PRCS Command
- Model Check
Model Execution
- Execution Setup
- Plot Settings
- Methods of Running a Model
- Extracting Outputs
Creating a Model Folder
Before we start to code, we will need to set up a folder to hold the files we will be using the new file explorer:
- Open OnScale in Analyst Mode
- Create a new folder and rename it PZT Disc Example in a directory of your choosing
- Navigate into the folder by double clicking the folder
- Click save (or CTRL+S) and navigate to the PZT Disc Example folder
- Double check file is save as .flxinp
- Name the file PZT2D
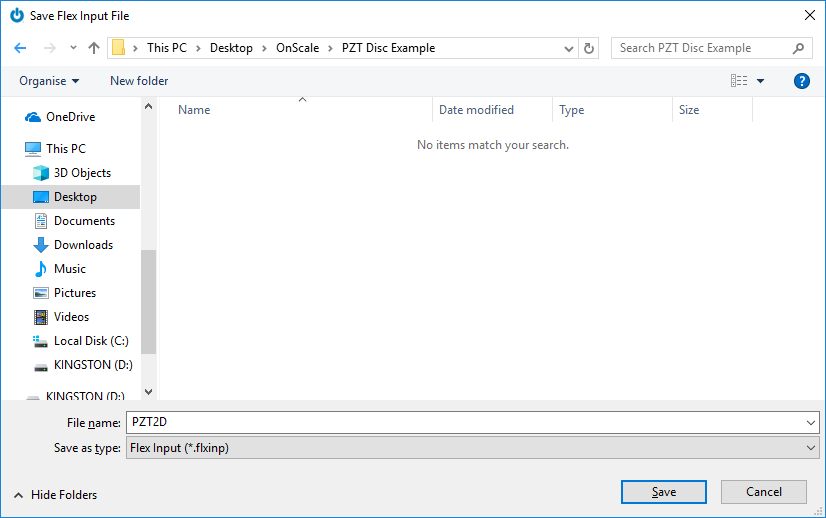
7. Save file
The file explorer should now contain the file PZT2D.flxinp
You are now ready to code!!
Model Inputs
Default Commands
The first lines of code in a model file should typically start with comments with basic information such as:
- Author of the Model File
- Description of the model
- Date
- Version Number
- Any other useful information worth sharing to another OnScale use
c
c designer: onscale
c model description: pzt 2d axisymmetric disc
c date: dd/mm/yyyy
c version: 1.0
c
There are 3 lines of commands that usually follow:
- titl - Provide titling information and identifiers for output results
- mp omp - Provide titling information and identifiers for output results
- rest - Provide titling information and identifiers for output results
c set model title titl training pzt 2d disc example
c use all cores mp omp * *
c do not save restart file rest no
Parameterization
Parameterizing the model allows changes to applied to your model very quickly and intuitively. We should always be using variables where possible to make setting up the model a simple as possible. For our PZT 2D disc example, we must identify critical dimensions that can be used to fully define the geometry - it is same process a mechanical engineer would go through to draft up a mechanical drawing of a component.
Tip: Always use symmetry to reduce model size and simplify the model
As the model will be axisymmetric around the Y axis, we can apply symmetry vertically through the centre of the geometry:
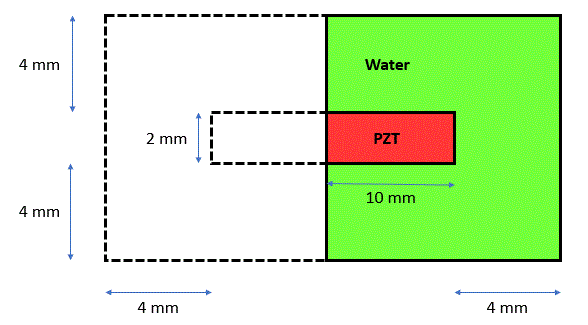
Note: Although the geometry is quarter symmetric, we cannot apply horizontal symmetry as the electrical loading conditions will not be symmetric across the X-axis. Always be aware of how symmetry will affect other aspects of your model.
3 variables are all that is required to fully define this geometry:
c geometry
symb water_size = 4e-3/* dimension of water around transducer
symb pzt_rad = 10e-3 /* pzt radius
symb pzt_thk = 2e-3/* pzt thickness
Tip: For more complex model there will be many more variables so always try to give meaningful variable names
Always maintain consistent units of measurement throughout the model - OnScale typically operates in SI units.
Model Input Section Code
c
c designer: onscale
c model description: pzt 2d axisymmetric disc
c date: dd/mm/yyyy
c version: 1.0
c
c set model title
titl training pzt 2d disc example
c use all cores
mp omp * *
c do not save restart file
rest no
c geometry
symb water_size = 4e-3 /* dimension of water around transducer
symb pzt_rad = 10e-3 /* pzt radius
symb pzt_thk = 2e-3 /* pzt thickness
Meshing
Mesh Settings
Meshing is one of the key components to obtaining accurate results. The elements that are used to construct a mesh must take into account a number of aspects to be able to discretise stress gradients accurately within the model. The following parameters are typically used to determine the required element size which we commonly refer to as box:
- Frequency of interest
- Typical variable name - freqint
- Set to the centre of the frequency band that you are interested in
- Slowest wave velocity in the model
- Typical Variable name - vel
- Generally set to the lowest shear wave velocity in the model
- Shortest wavelength in the model
- Typical variable name - wavelength
- Calculation of the shortest wavelength based on vel and freqint
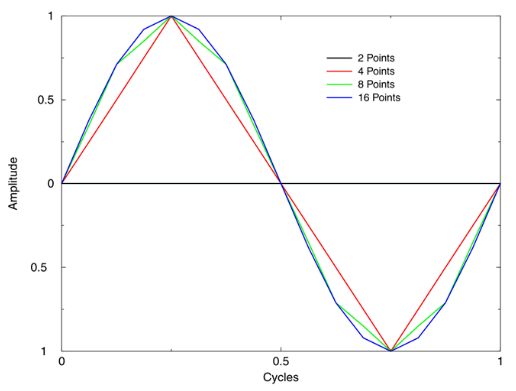
- Number of elements to discretise a wavelength
- Typical variable name - nepw
- Minimum value of 15 elements per wavelength is recommended
- Size of an element
- Typical variable name - box
- Calculated from the wavelength divided by number of elements per wavelength
c frequency and mesh
symb freqint = 1e6 /* frequency of interest
symb freqdamp = $freqint /* set damping frequency to frequency of interest
symb vel = 1500 /* minimum material velocity in model symb wavelength = $vel / $freqint /* calculate smallest wavelength to disctretise
symb nepw = 15 /* number of elements per wavelength
symb box = $wavelength / $nepw /* calculate element size for meshing
The freqdamp variable is not used as part of the meshing process but, it is usually set here with the value of freqint to align the damping characteristics of the materials over the correct frequency band of interest. This will be explained in a bit more detail in the next part of the tutorial.
Note: more elements per wavelength can be used to increase accuracy or minimise numerical dispersion*, however, this MUST be traded off against additional computational time. For example, in a 3D model, doubling the amount of elements per wavelength with multiply the model size by a factor of 8. Therefore, the effect of diminishing returns must be considered. Unless it is absolutely necessary, a small increase in accuracy is not necessarily worth the x10-20 increase in simulation time
*Numerical Dispersion is inherent in all numerical codes and is a small cumulative error that is caused due to sampling a wave in space and time. The non-physical phenomenon causes different frequencies to travel a different velocities; changing the shape of the wave with in turn can lead to amplitude (time domain) and phase (frequency domain) errors.
Keypoint Generation and Grid Setup
#keycord:
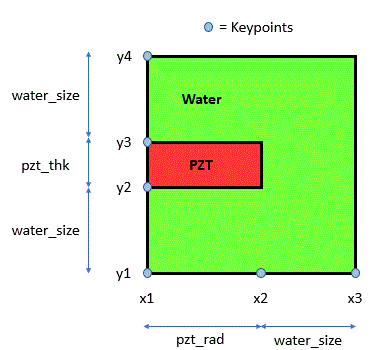
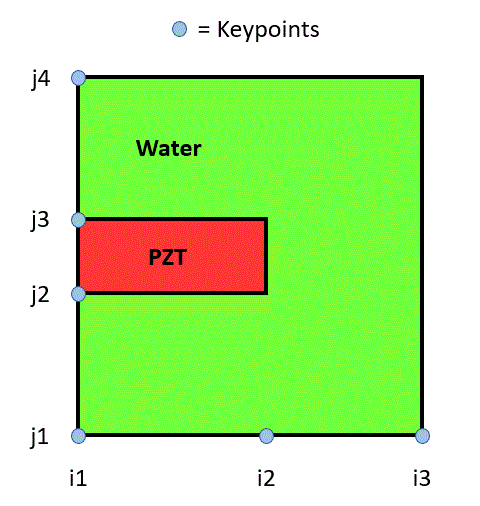
Keypoints are critical points in space that will be used to accurately map out the dimensions of your geometry. Using the variables created in the Model Inputs section, we can use the #keycord command to generate these keypoints along the X and Y axis:
c create x-y-z keypoints to accurately model dimensions
symb #keycord x 1 0.0 $pzt_rad $water_size
symb #get { idx } rootmax x /* store last keypoint indice in variable 'idx'
symb #keycord y 1 0.0 $water_size $pzt_thk $water_size
symb #get { jdx } rootmax y /* store last keypoint indice in variable 'jdx'
The #keycord command is very simple to set up:
- Access the command through symb command
- The first input argument is the direction which the keypoint will be generated: x,y or z (3D models)
- The indice value which the keypoint will start from :1
- The absolute value which the first defined keypoint
- The dimensions to define folllowing keypoints: variables created
What the code will yield:
Tip: we always record the last indice value using the #get rootmax option. Note that #get operations use braces { } instead of regular brackets ( )
It is useful to have quick access the last node/keypoint on the grid to use in additional commands and for debug purposes.
#keyindx:
Following on from the XYZ keypoints, we need to determine how many elements are required to represent the distances along the XY direction which for the computatinal grid shall also be known as the IJ direction. We can use the dedicated symb command, #keyindx to do so:
c create i-j-k keypoints
symb #keyindx i 1 $idx 1 $box 1 /* calculate number of nodes required in i direction
symb #keyindx j 1 $jdx 1 $box 1 /* calculate number of nodes required in j direction
symb indgrd = $i$idx /* last node number in i direction
symb jndgrd = $j$jdx /* last node number in j direction
- Access the command through symb command
- the first input argument is the direction which the keypoint will be generated - i, j or k(3D models)
- the first keypoint indice value - 1
- the last keypoint indice value - $idx $jdx or $kdx
- keypoint incremental value - 1
- This value allows keypoints to be skipped for the number of elements between keypoints calculation (i.e. 1 = (x1-x2-x3-x4-x5) or 2 = (x1-x3-x5) etc.)
- maximum size of element - $box
- minimum spacing between keypoints - 1
- Places at least one element by default in between keypoints to prevent errors
- If value = 4, a minimum of 4 elements will always be created in between keypoints
Note: we recommend that element aspect ratio should not exceed 4:1 for stability and accuracy reasons so be careful when you are setting minimum spacing value to a higher integer value
GRID and GEOM command:
c create grid
grid $indgrd $jndgrd axiy /* generate grid of nodes and apply axisymmetric condition to model grid
c map physical geometry to grid of nodes
geom keypnt $idx $jdx /* tie in all xy keypoints (physical dimensions) to ij keypoints(nodes)
The grid command is very simple: it will generate a grid of evenly spaced nodes/elements based on the integer values input and allows the grid to be axially rotated to create axisymmetric models.
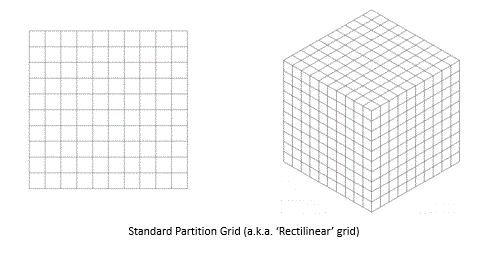
The geom command ties in the physical distances to the nodal spacing, and where there is a keypoint, a node must lie at that precise location. This means that your mesh will look more like this:
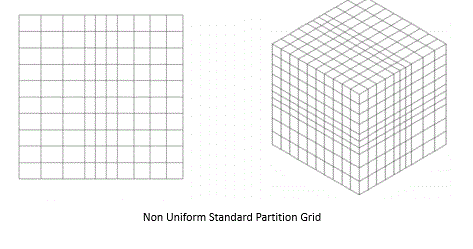
This is one of the reasons why we set up models using keypoints: so that the important aspects of our geometry are at the exact required size.
Meshing Section Code
c frequency and mesh
symb freqint = 1e6 /* frequency of interest
symb freqdamp = $freqint /* set damping frequency to frequency of interest
symb vel = 1500 /* minimum material velocity in model
symb wavelength = $vel / $freqint /* calculate smallest wavelength to disctretise
symb nepw = 15 /* number of elements per wavelength
symb box = $wavelength / $nepw /* calculate element size for meshing
c create x-y-z keypoints to accurately model dimensions
symb #keycord x 1 0.0 $pzt_rad $water_size
symb #get { idx } rootmax x /* store last keypoint indice in variable 'idx'
symb #keycord y 1 0.0 $water_size $pzt_thk $water_size
symb #get { jdx } rootmax y /* store last keypoint indice in variable 'jdx'
c create i-j-k keypoints
symb #keyindx i 1 $idx 1 $box 1 /* calculate number of nodes required in i direction
symb #keyindx j 1 $jdx 1 $box 1 /* calculate number of nodes required in j direction
symb indgrd = $i$idx /* last node number in i direction
symb jndgrd = $j$jdx /* last node number in j direction
c create grid
grid $indgrd $jndgrd axiy /* generate grid of nodes and apply axisymmetric condition to model grid
c map physical geometry to grid of nodes
geom keypnt $idx $jdx /* tie in all xy keypoints (physical dimensions) to ij keypoints(nodes)
Materials
Material Properties
The material types most commonly used in OnScale are:
Linear Elastic Isotropic (type elas)
- Material properties that are consistent in all axis directions
- Minimum required properties are density, bulk and shear moduli
Example Code:
matr type elas wvsp off prop epoxy $density $bulkmod $shearmod
Or using wave velocites:
matr type elas wvsp off prop epoxy $density $vellong $velshear
Tip: use the wvsp command to allow material to be defined by longitudinal and shear velocities
Anisotropic - Piezoelectric (type lean)
- Material properties are unique in each axis direction.
- Accurate modelling of piezoelectric materials requires the following parameters
- Density
- 6 stiffness [c] or compliance [s] components
- 3 piezo electric stress [e] or strain [d] constants
- 2 dielectric constant [εS]
Tip: By default OnScale accepts: constant stiffness parameters [c]; piezoelectric stress constants [e] and dielectric properties under constant strain [εS]
Example Code:
matr type lean prop pmt3 $rho $c11 $c12 $c13 0.0 0.0 0.0 $c11 $c13 0.0 0.0 0.0 $c33 0.0 0.0 0.0 $c44 0.0 0.0 $c44 0.0 $c66 piez pmt3 1 5 $ex5 2 4 $ex5 3 1 $ez1 3 2 $ez1 3 3 $ez3 elec pmt3 $epxx $epxx $epzz
Nonlinear - Biological (type tisu)
- Nonlinear effects can be supported provided that pressure levels are high enough to initiate them.
- Additional material properties require additional inputs over conventional linear elastic materials:
- B/A - B over A (commonly know for biological materials)
- Maximum pressure cut-off - negative number as compression is negative in OnScale
- Minimum pressure cut-off - set to a large positive number for wave 'steepening'
Example Code:
matr
wvsp on
type tisu
symb pmax = 2.e6
symb pmaxn = -2.e6
symb ba = 10.0
prop fatnl 928. 1427. 0. 0.01 0.0 0.0
$ba $pmaxn $pmax
Material Damping
Material damping must also be defined to accurately simulate your materials. OnScale offers a number of damping models to be used depending on your material type:
- Stiffness damping - sdmp command
- Mass damping - mdmp command
- Rayleigh damping - rdmp command
- Viscoelastic damping - vdmp command
The method of definition is similar across each of the damping models and requires the following information:
- name of the material
- frequency at which the damping model is centred at
- damping option allows the convention of damping values to be set - Q-factor (q); dB/distance (db) or Fraction of critical damping (crit)
- dilatational wave attenuation value
- shear wave attenuation value
- Frequency at which the attenuation values were measured at
- exponent to control how damping varies with frequency
- Only if option was set to db – sets the distance over which the damping values are achieved
Example 1:
vdmp epoxy $freqdamp db $attlong $attenshear $measuref $exponent $dist
Example 2:
rdmp piezo $freqdamp q $attlong $attenshear $measuref $exponent
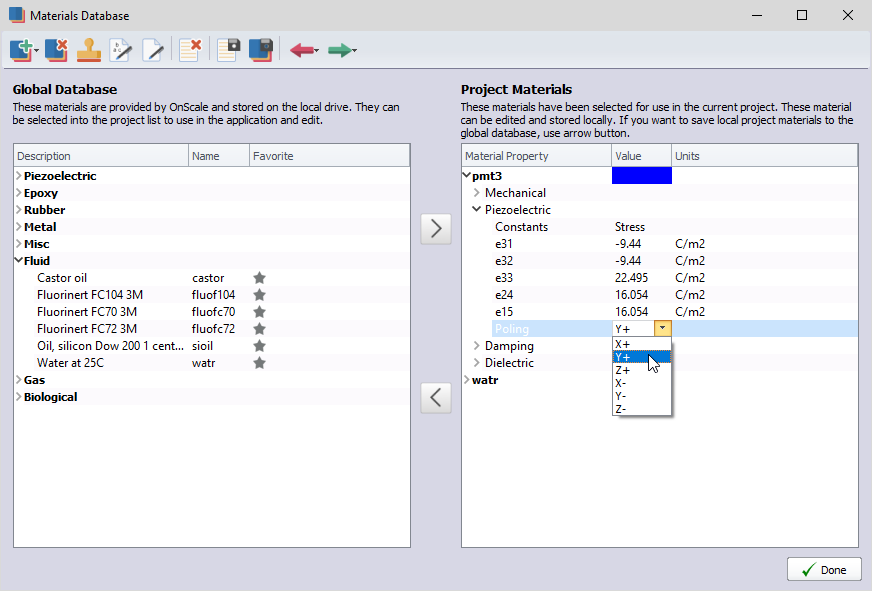
Material Database
OnScale provides an extensive material database to browse and select from using our new Material Database Tool. This allows you to create a custom project material file with all the code definitions, ready to be imported into your model file:
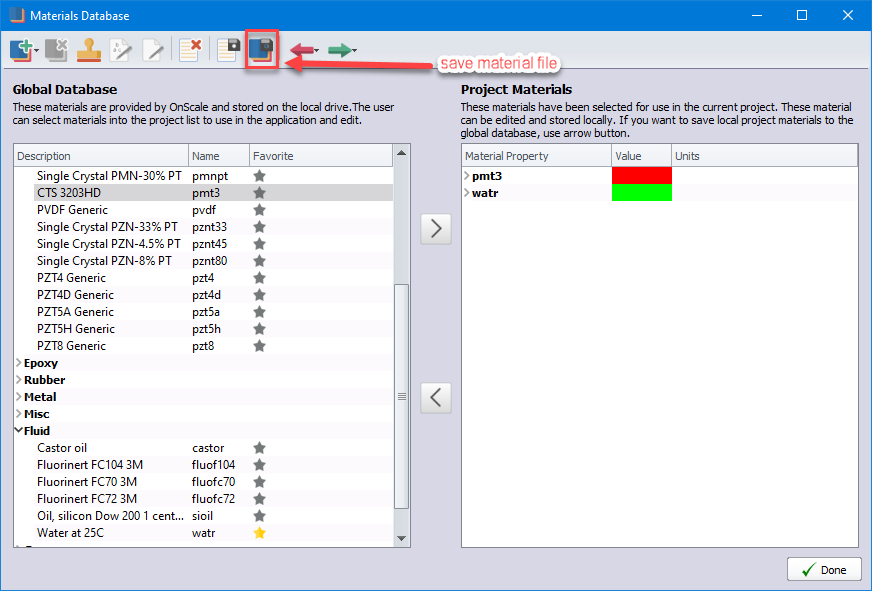
Note you will need to modify the piezoelectric material (pmt3) poling direction to Y+ to match the thickness direction of the model.
For more information on piezoelectric material properties, read: What are Anisotropic and Piezoelectric Materials?
c material defintions symb #read training.prjmat /* materials stored in .prjmat file and read into flex model
The OnScale material database are an excellent starting point if you do not have the exact properties for the materials you are using. Material properties tends to be the weakest link in the simulation chain due to the lack of information provided by the manufacturer and difference in properties from batch to batch.
Note: if possible, characterise the materials you are using for accurate simulation results otherwise, be aware that there will be slight discrepancies when compared to experimental results
Assigning Materials to Grid
SITE:
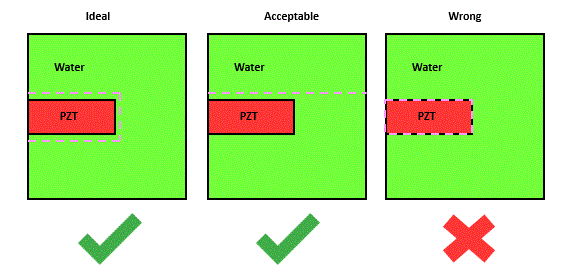
The site command is what is used to apply materials to the model grid. There are a number of different primative shapes to allow you to recreate your desired geometry. The site command operates like paint brush a paint canvas, the last material application will appear on top and overwrite any material previously applied to the same region. Looking at our model geometry:
The simplest method will be to apply water to the full model grid and the overwrite the smaller region with PZT using the regn command:
c allocate materials to grid
site
regn watr /* assign watr to full grid
regn pmt3 $i1 $i2 $j2 $j3 /* assign material 'pmt3' to grid defined by nodal range end
Tip: the end command tells the compiler that it is no longer executing subcommands within a primary command. Although not required, it is good coding practice to include this to clearly signal the end of primary commands.
Checking the Model:
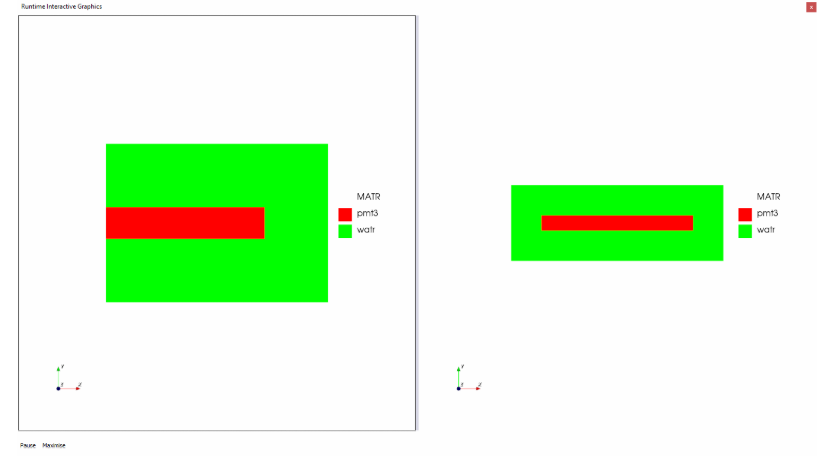
With the structure of the model set up, we should always check that we have applied materials to the correct part of the grid. For any plotting requirements, the grph command should be used to configure and plot any available model data:
c plot model grph nvew 2 2 /* set up 2 views plot matr /* plot model mirr x on /* apply visual symmetry plot matr /* replot model end term /* pause model
- nvew - controls the plotting window arrangement
- plot - plots any requested data array
- mirr - applies symmetry to the graphical plot
- term - pauses model to allow user input in the terminal
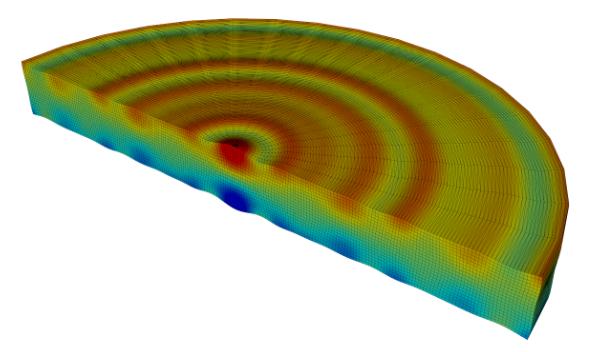
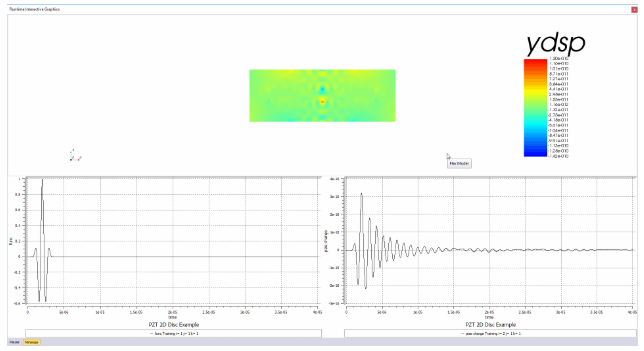
The FEA model at this point can be plotted by running the software for the first time. The compiler will execute all lines of code sequentially up until the it reaches the term command. Click on the Run icon to execute the model and the following Runtime Interactive Graphics window will appear:
Material Section Code
c material defintions
symb #read training.prjmat /* materials stored in .prjmat file and read into flex model
c allocate materials to grid
site
regn watr /* assign watr to full grid
regn pmt3 $i1 $i2 $j2 $j3 /* assign material 'pmt3' to grid defined by nodal range end
c plot model
grph
nvew 2 2 /* set up 2 views
plot matr /* plot model
mirr x on /* apply visual symmetry
plot matr /* replot model
end
term /* pause model
Boundary Conditions & Loading
Boundaries of a Model
Now that we have fully assigned material to the entire grid, the external boundaries of the water need to be set up correctly to reflect how the areas beyond the model would behave in the real world. OnScale has a number of pre-defined boundary conditions to be applied by the user with the boun side command. The most commonly used boundary conditions are:
- free
- nodes can move freely with no external forces acting upon them
- When to use: edge of model is at
- symm
- boundary for symmetrical geomtries
- assumed that what occurs on one side occurs on the other
- When to use: model is the same geometrically and electrically across the boundary
- absr
- infinite media/load
- energy continues past boundary with no reflections
- When to use: edge of model continues infinitely with the same material (typically a large body of water)
- fixd
- nodes are completely fixed - zero displacement
- energy is perfectly reflected
- When to use: edge of model is infinitely stiff
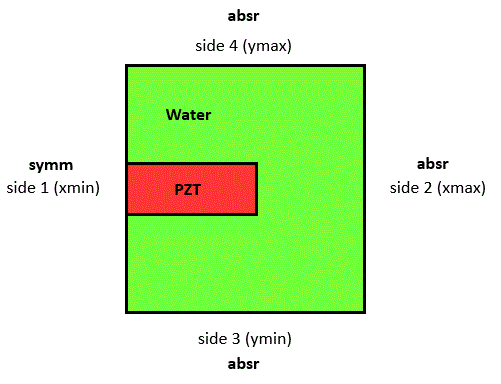
The model should be set up with the following boundaries to simulate the PZT disc in a infinite body of water:
c boundary conditions & loading c external boundary conditions boun side xmin symm /* assign symmetry condition xmin side of model side xmax absr /* assign absorbing boundary condition (infinite medium) side ymin absr /* to xmax ymin and ymax side side ymax absr end
Time Functions & Piezoelectric Loads
The model has now been fully geometrically defined which means we can technically execute the model however, the model will remain static over time. We need to provide some form of input to stimulate the model which typically falls into 2 categories:
- Pressure loads - for simulating purely mechanical wave problems
- Piezoelectric loads - for simulating piezoelectric devices
Before we set up the loading conditions, an input waveform, also referred to as a Time Function, is required. OnScale provides a variety of Time Functions to use in the model ranging from sinusoids, wavelets and user-defined functions too. See func for a full list of input types. There is also a Time Function Tool to set up and visualise the input signals to be used within the model.
Tip: OnScale recommends using the Ricker Wavelet (wvlt) time function due to its broadband performance and low spectral leakage beyond 2.5x the centre frequency.
c define time varying function func wvlt $freqint 1. /* wavelet impulse function c piezoelectric loads symb ascale = 6.28 /* area scaling for electrode area - required for accurate simulation of impedance amplitude - not required for axiy model piez wndo $i1 $i2 $j2 $j3 /* define electric window to pzt material - minimise for faster model run time defn top /* define electrode - name 'top' node $i1 $i2 $j3 $j3 /* assign nodes for top electrode defn bot /* define electrode - name 'bot' node $i1 $i2 $j2 $j2 /* assign nodes for bottom electrode /* electrical boundary condition bc top volt func /* apply voltage condition to 'top' electrode and assign driving signal 'func' bc bot grnd /* apply ground condition to 'bot' electrode slvr pard /* use pardiso solver - our new faster electrostatic solver for piezo simulations end
Defining the piezoelectric load requires the piez primary command and the following subcommands:
- wndo
- Define the electric window - the region of the grid desginated for the electro-mechanical calculation
- OnScale uses a hybrid method for the calculation by using an implicit (for the electrical calculations)and explicit solver (for the mechanical calculations) to minimise runtime.
Tip: Always try to minimise the electric window size to reduce model runtime and memory requirements.
- defn
- To initiate the definition of an electrode within the model with a reference name
- Also used to set the electrode area scaling to accurately simulate the capacitance of a piezoelectric device
- The simulated area must be same as the electrode area on your physical device
- For 2D models - must multiply by the dimension in the unmodelled direction and account for any symmetry conditions (x2 multiplier for each symm condition)
- For 2D axisymmetric models - no scaling is required as solver knows the exact size of device
- For 3D models - only need to account for symmetry conditions(x2 multiplier for each symm condition)
- node
- define the exact nodes on the grid to create the electrical boundary
- node command must follow the defn command
- bc
- applies electrical boundary conditions (ground, voltage, open etc...) to the electrodes generated by the defn and node commands
- slvr
- Selects the solver to use for the electrostatic calculations.
- pard is typically the fastest solver especially for large piezoelectric models
Tip: Alternative solvers will be slower however, some will offer a solution using much less memory if there are hardware limitations. See slvr.
Boundary Conditions & Loading Section Code
c boundary conditions & loading c external boundary conditions
boun
side xmin symm /* assign symmetry condition xmin side of model
side xmax absr /* assign absorbing boundary condition (infinite medium)
side ymin absr /* to xmax ymin and ymax side
side ymax absr
end
c define time varying function
func wvlt $freqint 1. /* wavelet impulse function c piezoelectric loads
symb ascale = 6.28 /* area scaling for electrode area - required for accurate simulation of impedance amplitude - '1' for axiy model
piez
wndo $i1 $i2 $j2 $j3 /* define electric window to pzt material - minimise for faster model run time
defn top /* define electrode - name 'top'
node $i1 $i2 $j3 $j3 /* assign nodes for top electrode
defn bot /* define electrode - name 'bot'
node $i1 $i2 $j2 $j2 /* assign nodes for bottom electrode /* electrical boundary condition
bc top volt func /* apply voltage condition to 'top' electrode and assign driving signal 'func'
bc bot grnd /* apply ground condition to 'bot' electrode
slvr pard /* use pardiso solver - our new faster electrostatic solver for piezo simulations
end
Model Outputs
Calculated Properties
By default OnScale will calculate the velocity arrays for a simulation. Anything that is required beyond these arrays must be requested explicitly in order to be calculated and stored. The most common calculated data arrays are:
- Pressure: pres & aprs
- Displacement: disp (accessed through: xdsp, ydsp, zdsp)
- Stresses: strs (all 6 components accessed through the sg arrays e.g. sgxx sgyy...)
- Strain: strn (all 6 components accessed through ep arrays e.g. epxx epyy...)
- Loss: loss
- Maximum data arrays: max
For example, the code would look like:
calc pres aprs /* calculate pressure and acoustic pressure disp /* calculate displacement strn /* calculate strain strs /* calculate stress loss /* calculate losses max aprs pmin pmax /* capture minimum & maximum acoustic pressure and store in 'pmin' & 'pmax' array end
For our PZT disc example, we require acoustic pressure, displacements and the maximum acoustic pressure field:
calc pres aprs /* calculate pressure and acoustic pressure disp /* calculate displacement max aprs none pmax /* capture maximum acoustic pressure only and store in 'pmax' array end
Output Types
Time Histories:
Time Histories in OnScale are simply data fields captured over time for specific nodes/elements in the model.
As a time-domain solver, OnScale can generate any of the calculated data arrays as a set of time histories. All that is required is to request the data at specific locations on the IJK grid which can be done using the pout and the following subcommands:
- hist
- Allows data field time histories to be extracted for nodes and elements on the IJK grid
- Example:
pout hist func /* time function - does not require ijk location hist pres $i1 $i1 1 $j3 $j3 1 /* pressure for a single element hist pres $i1 $i2 1 $j3 $j3 1 /* pressure for every elements in from i1 and i2 hist pres $i1 $i2 2 $j3 $j3 1 /* pressure for every 2nd element from i1 and i2 end
- histname
- Allows time histories to be extracted for specific named objects without the need to input IJK indice locations
- Example:
pout histname electrode vqi all /* voltage, charge & current data for all electrodes defined histname electrode vq top /* voltage & charge data for 'top' electrode histname avrg a all /* store all requested averages histname avrg a avepres /* store the average with name 'avepres' end
All time histories are given an array number in the sequence they are defined. The array numbers gives you access to the data array and can be used for plotting purposes if we want to visualise these signals during the model execution stage. This will be demonstrated later on in the tutorial. For our PZT example, we want to extract the time function, voltage and charge on all electrodes and the Y-displacement at the centre point on the top PZT surface:
pout hist func /* time function - array '1' histname electrode vq all /* voltage and charge data for all electrodes - array '2-5' hist ydsp $i1 $i1 1 $j3 $j3 1 /* y-displacement at node on the top electrode - array '6' end
Mode Shapes:
Mode shapes are extracted through Harmonic Analysis methods. In OnScale, we can extract the harmonic behaviour of a system by performing DFTs at specified frequencies of interest. This can also be performed for specific data fields of interest, for example pressure, x-displacement and many others. It is a powerful tool as it can provide insights into system behaviour that may be difficult to achieve in a other ways.
The advantages of performing harmonic analysis in this manner, rather than with a modal solver, is that this method takes into account damping and mode-coupling in a more effective manner. It will therefore correspond more directly with experimental measurements from laser vibrometers taken in a similar manner i.e. driving a system at a constant frequency.
Mode shapes can be created via the shap command. This allows the user to specify the harmonic frequencies (freq) they are interested in along with any additional data fields (data) they wish to extract, for example:
shap data pres /* pressure data to be extracted with mode shapes data xdsp /* x displacement data to be extracted with mode shapes freq 1.5e6 /* mode shape '1' freq 3.e6 /* mode shape '2' end
For our PZT example, we want to extract the mode shape at the frequency of interest $freqint along with the displacement data in the X and Y directions:
shap data xdsp /* x displacement data to be extracted with mode shape data ydsp /* y displacement data to be extracted with mode shape freq $freqint /* mode shape '1' end
Extrapolation:
OnScale works most efficiently when models are on the order of tens of wavelengths in size along each axis. Medical and Sonar devices, however, commonly require predictions of pressure amplitudes at distances many hundreds of wavelengths from the source. These are either impractical or inefficient to model fully. The best approach in such cases is to extrapolate.
The Kirchoff extrapolation technique is a powerful tool incorporated into OnScale. It uses analytic techniques (essentially a combination of Green's functions and Huygen's principle) to take pressure/time data from the finite-element model and extrapolate to a full pressure/time response at any arbitrary location or locations.
The technique is valid in both near and far fields, but makes several assumptions:
- Propagating medium is homogenous, i.e., no intervening layers
- Propagating medium is fluid, i.e. no shear waves
- Propagating medium is either lossless or very low loss
- Response is linear
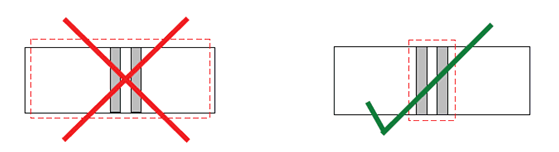
Tip: ideally, the extrapolation boundaries should encompass the full device in water but this is not always practical. In such cases, place the boundaries around as much of the device as possible. The boundary should be close but not be in contact with the device, typically 5 - 10 elements from the transducer:
For our PZT example, we will set up a single extrapolation boundary across the top of the device with a few lines of code:
extr defn kirc /* define type extrapolation boundary type - kirchoff ref in $x1 $y2 /* reference point to determine extrapolation vector node $i1 $indgrd-1 $j3+5 $j3+5 /* extrapolation boundary at the defined nodal indices driv func /* storing time function to allow tvr calculation in toolkit end
extr is the extrapolation primary command which contains the subcommands to set up the extrapolation calculation:
- defn
- To define the type of extrapolation boundary type to use - Kirchoff (kirc) is best suited option to use
- ref
- To determine which side of extrapolation boundaru to extrapolate out from
- The reference point can be anywhere in your model - you must correctly define whether the point is inside (in) or outside (out) the extrapolation boundary. Outside being the direction of the infinite medium where you are interested in the extrapolated outputs.
- node
- Defines the extrapolation boundary on the model grid using the IJK indices
- driv
- Stores the drive function in the extrapolation output file to allow for Transmit Voltage Response (TVR) calculation.
The analysis of the mentioned outputs will be discussed in more detail in the Post Processing section.
Model Outputs Section Code
calc
pres aprs /* calculate pressure and acoustic pressure
disp /* calculate displacement
max aprs none pmax /* capture maximum acoustic pressure only and store in 'pmax' array
end
pout
hist func /* time function - array '1'
histname electrode vq all /* voltage and charge data for all electrodes - array '2-5'
hist ydsp $i1 $i1 1 $j3 $j3 1 /* y-displacement at node on the top electrode - array '6'
end
shap
data xdsp /* x displacement data to be extracted with mode shape
data ydsp /* y displacement data to be extracted with mode shape
freq $freqint /* mode shape '1'
end
extr
defn kirc /* define type extrapolation boundary type - kirchoff
ref in $x1 $y2 /* reference point to determine extrapolation vector
node $i1 $indgrd-1 $j3+5 $j3+5 /* extrapolation boundary at the defined nodal indices
driv func /* storing time function to allow tvr calculation in toolkit
end
Process Model
PRCS Command
Before running the model, you should always issue the prcs command. In preparation for processing the time-step information, it computes the model time step for stability and opens the necessary arrays for field-data storage.
prcs
Although the prcs command is automatically entered with the first exec command if it has not already been so, it is good practice to enter it before beginning. Once it is entered, no alterations to model geometry, material properties, and so on are permitted.
Although 80% is default, it can be on the conservative side for some models. Users can adjust this upwards using the time command (must be issued before the prcs command) to help:
- Reduce simulation time (larger timestep means less steps for a set simulation time)
- Increase accuracy (reducing the amount of sampling in the time domain)
However, it is important to note than increasing it too much will eventually cause the model to become unstable, and care should be taken. A good value to try initially is 0.95:
time * * 0.95
Increasing the TSF is also useful if you are running a model that propagates over longer distances (>25 wavelengths). By reducing the effect of sampling in the time domain, the solution at each timestep is more accurate, and therefore the cumulative effects of numerical dispersion can be lessened somewhat.
Model Check
Typically after the prcs command, certain aspects of the model can be plotted and to check if they have been set correctly:
- model Boundaries
grph plot boun_type /* plot model boundaries
- defined electrodes with poling arrows
grph arrow pole /* turn on material poling arrows plot piez /* plot defined electrodes with poling arrows
- plot material geometry with electrodes and poling arrows
grph arrow pole /* turn on material poling arrows plot matr piez /* plot defined electrodes over model geometry with poling arrows
- plot material geometry with electrodes and poling arrows
grph arrow cstm 10 5 xvflow yvflow /* set up custom vector arrows for flow velocities plot xvflow yvflow /* plot combination of x and y flow fields with velocity arrows
For any piezoelectric model, it important to check if material poling has been set correctly otherwise, the device may not perform as expected. For most piezoelectric transducer applications, the poling should be in parallel with the thickness direction of the PZT. For our PZT example, this should be along the Y-axis. To change the poling direction of any material, we must access the it in our material file and locate the matr axis command for the PZT material we are using:
...
elec pmt3 $aepxx $aepyy $aepzz
piez pmt3 1 1 $ex1 1 2 $ex2 1 3 $ex3 1 4 $ex4 1 5 $ex5 1 6 $ex6 &
2 1 $ey1 2 2 $ey2 2 3 $ey3 2 4 $ey4 2 5 $ey5 2 6 $ey6 &
3 1 $ez1 3 2 $ez2 3 3 $ez3 3 4 $ez4 3 5 $ez5 3 6 $ez6
rdmp pmt3 $freqdamp q $qdmp $qsdmp $freqloss 1.0
axis pmt3 posy /* relate materials local system to global system
...
Tip: by default, there are material axis definitions which can be used to control the material poling along each of the XYZ axes. Use the desired axis definition through its name: posx, negx, posy, negy, posz and negz.
For our PZT example we will set up the plotting with the following code:
grph nvew 2 1 line on /* turn on mesh lines arrow pole /* turn on poling arrows plot piez /* plot created electrode plot matr piez /* plot created electrode on top of model end term /* pause model to allow check
Process Model Section Code
prcs /* check models, sets up required data arrays, calculates stable timestep for solver to run model grph
nvew 2 1
line on /* turn on mesh lines
arrow pole /* turn on poling arrows
plot piez /* plot created electrode
plot matr piez /* plot created electrode on top of model
end
term /* pause model to allow check
Model Execution
Execution Setup & Running the Model
Following on from processing the model and final checks, we can run the model in a number of ways.
Basic Model Execution:
The basic information required prior to executing the model:
- Model timestep (step)
- Simulation runtime (simtime)
- Simulation runtime in terms of number of timesteps (nexec)
c runtime calculations symb #get { step } timestep /* extract calculated timestep from prcs command symb simtime = 40 / $freqint /* simulation time - 40 cycles @ 1 mhz symb nexec = $simtime / $step /* determine how many timesteps to run full model
Once we have the total number of timesteps to run the simulation for, we can use the exec command to execute the model. Typically, we would set up plots for to visualise the simulated outputs too:
c running the model exec $nexec /* execute model for 'nexec' timesteps c plot outputs grph nvew 3 1 /* set up 3 views for data plots plot ydsp /* plot calculated data array plot pmax /* plot max pressure data array plot 2 /* plot time history 2 - pressure signal at front of defect end term /* pause model to view results
Great! We ran our first simulation however, we may want to visualise data at points thoughout the model simulation for analysis/debugging purposes. We can improve on this method by using a do loop.
Improved Model Execution:
Additional variables are required for the do loop method of executing the model:
- Number of do loop iterations(nloops)
- Number of timestep executions per do loop iteration (nexec2)
c runtime calculations symb #get { step } timestep /* extract calculated timestep from prcs command symb simtime = 40 / $freqint /* simulation time - 40 cycles @ 1 mhz symb nexec = $simtime / $step /* determine how many timesteps to run full model symb nloops = 80 /* plotting snapshots during model execution symb nexec2 = $nexec / $nloops /* partition full simulation into smaller segments for plotting
The do loop will have to loop nloops times, and will have to execute the model for nexec2 timesteps before plotting the results to the interactive graphics window.
c setting up output plots grph arrow off /* turn off arrows line off /* turn off mesh lines nvew 3 1 /* set up 3 plotting windows in layout number 1 end do loopi i 1 $nloops 1 /* setting up do loop exec $nexec2 /* run model for 'nexec2' timesteps grph plot ydsp /* plot calculated data array plot 1 /* plot time history 1 - drive function plot 3 /* plot time history 3 - charge on top electrode imag /* snapshot of graphics window for movie generation end end$ loopi term /* pause model to view results
The do loop is very simple to set up:
- Initiate the do command
- Assign the do loop with a name(loopi)
- Assign the do loop with a loop variable (i) i.e. to control how many loops to run for
- Define start and end value the loop variable(1 to $nloops)
- Define incremental value to step through from start to end value(1)
Place the exec and grph commands within the do loop and terminate the do loop using the end$ command followed by the name of the loop.
Tip: Always minimise the amount of execution code within a do loop or procedure for optimal runtime performance. Avoid placing grph setup commands within the execution loops such as nvew, mirr etc.
The do loop has allowed us to view the simulated results at interval stages of the model right through until the end of the simulation however, there may be situations where we haven't simulated the model for a long enough time period. In such cases, we would need to restart the model and increase the simtime variable and re-run the entire model again which is very inefficient. We can further improve the model execution process using a procedure.
Optimal Model Execution:
A procedure is a segment of code that can be recalled a number of times using the proc command. It is almost identical to how we have set up the do loop; we simply replace the do loop with the proc setup commands:
proc plot save /* setting up procedure with name 'plot exec $nexec2 /* run model for 'nexec2' timesteps grph plot ydsp /* plot calculated data array plot 1 /* plot time history 1 - drive function plot 3 /* plot time history 3 - charge on top electrode imag /* snapshot of graphics window for movie generation end end$ proc /* end procedure proc plot $nloops /* call 'plot' procedure 'nloops' times term /* pause model to view results
So when the simulation reaches the term command now, the user can enter in the console input:
p> proc plot 10
which will execute procedure for an additional 10 times.
Tip: Always use a procedure to execute a model for greater control of your execution stage, should you ever need it.
Extracting Outputs
After the simulation has fully executed, we can ask the solver to output certain data calculated during the simulation to an output file (.flxdato) ready to be post-processed. Most commonly we extract: the model geometry, any of the calculated properties (pres aprs xdsp loss pmax etc.) and any requested mode shape data.
data out modl /* outputs model geometry out pres /* outputs pressure data field at the final simulated timestep out shap/all /* output all requested mode shape data end
It is also good modelling practice to output all the symbol variables used in the model. This gives the user insight into settings used or perhaps to allow the variables to be read into a post processing script:
c save symbols to file for later use symb #get { label } jobname /* get model job name symb #save $label.symb /* save symbol file c end of input file stop
Finally, issue the stop command to exit the system process in an orderly fashion.
Model Execution Section Code
c runtime calculations symb #get { step } timestep /* extract calculated timestep from prcs command symb simtime = 40 / $freqint /* simulation time - 40 cycles @ 1 mhz symb nexec = $simtime / $step /* determine how many timesteps to run full model symb nloops = 40 /* plotting snapshots during model execution symb nexec2 = $nexec / $nloops /* partition full simulation into smaller segments for plotting
c setting up output plots grph arrow off /* turn off arrows line off /* turn off mesh lines
set imag avi /* set image capture for movie file generation nvew 3 1 /* set up 3 plotting windows in layout number 1 end
c create procedure - code that can be executed 'x' number of times
proc plot save /* name procedure 'plot' and save the code
exec $nexec2 /* run model partially
grph
plot ydsp /* plot calculated data array
plot 1 /* plot time history 1 - drive function
plot 3 /* plot time history 3 - charge on top electrode
imag /* snapshot of graphics window for movie generation
end
end$ proc /* end of procedure
c run model by calling 'plot' procedure 'nloops' times
proc plot $nloops
term /* pause model to view results
data
out modl /* outputs model geometry
out pres /* outputs pressure data field at the final simulated timestep
out shap/all /* output all requested mode shape data
end
c save symbols to file for later use
symb #get { label } jobname /* get model job name
symb #save '$label.symb' /* save symbol file
c end of input file
stop
Summary
All your models should follow the structure outlined in this tutorial example or be very similar in order to cover all aspects of your model setup. You will be able re-use the code from this model and develop it into models for your own applications. Here are is a checklist of questions you should always consider when building your model:
- Have all useful dimensions been captured to map out your geometry with keypoints?
- Has the mesh/grid been set up to accurately model your application?
- Have all the materials, to be used in the model, been defined and accessible in the file?
- Have materials been assigned to the correct location on the grid to recreate the desired geometry?
- Has the model been set up to interact with the external world beyond the model boundaries?
- Is there a method of stimulating/loading the model?
- Have all desired outputs been requested?
- Final checks before model execution?
- Run the model
Some additional advice and tips to help with coding your models:
- Always start with a small and simple 2D model - these are quick to run and can be used to debug set up issues, test new designs and confirm fundamental theories
- Comment throughout your model - helps others understand what is happening in your code as well as reminding yourself
- Keep your code tidy - much easier to spot coding errors when the code is structured well
- Used the debug window to figure out model issues - the debug show where errors encounter in your model file to help you pinpoint the issue
- Variables I J K L M N are integer variables by default - this is a very common error
- Use the command reference to figure out how to set up commands
Analyzing Model Outputs
Within your model folder directory, output files will have been generated from the simulations which can include the following file types:
- Flex History File - .flxhst - stores all data requested by the pout command
- Flex Data Out File - .flxdato - stores any data field requested using the data out command
- Flex Extrapolation - .flxext - the extrapolation file generated from the extr command
- Flex Print File - .flxprt - The print file contains a log of all the lines of code executed with additional model data
- Flex Symbol File - .symb - contains all variables used in the model
You are now ready to analyse your model outputs using the Post Processor!!
Running Parametric Sweeps
Any symb variable in the script can be switched to a parametric variable (symbx) that will allow you to sweep that particular parameter.
For example:
symbx water_size = 4e-3 /* dimension of water around transducer
symbx pzt_rad = 10e-3 /* pzt radius
symbx pzt_thk = 2e-3 /* pzt thickness
To find out how to sweep these parameters on the cloud head to the following article: Cloud Workflow